Global Positioning System
The Global Positioning System (GPS) is the first global navigation satellite system (GNSS) to be widely available for various civilian applications such as aeronautical navigation, surveying navigation, remote sensing, and geodesy. Other satellite constellations in GNSS include, Galileo (Europe), Glonass (Russia) and Beidou (China), among others. Since its applications have increasingly concerned with the human safety issue, the precision and reliability of GPS signal becomes essential. The ionosphere with fluctuation of electron density (or the satellite delay time) contributes to errors of positioning on GPS receiver at various times.
Ionospheric effects on GPS estimation
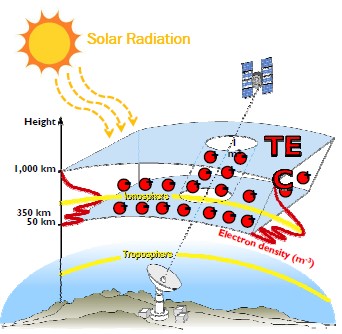
Ionosphere is an ionized region of the earth’s atmosphere. The electron density in the layer varies due to the effects of solar activities associated with the geomagnetic field, leading to several ionospheric irregularities. Such the irregular ionosphere causes the radio wave signals scatter and delay. As a result, through the varying delay time, the ionosphere affects the satellite communications such as navigation satellites, broadcasting satellites, observation satellites, communications satellites, and others.
Total electron content (TEC) is one of the parameters which characterizes the ionosphere. The TEC varies over time, space, and the ionospheric irregularities. The ionospheric delay (I) on GPS signals can be described in terms of TEC, inversely proportional to a square of frequency.
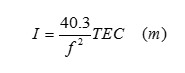
For example,
- At 1.57542 GHz (GPS L1), 16 cm delay per 1 TECU (1016/m2).
- At 1.22760 GHz (GPS L2), 27 cm delay per 1 TECU (1016/m2).
Currently, GPS satellite transmits L1, L2 and L5 frequencies.
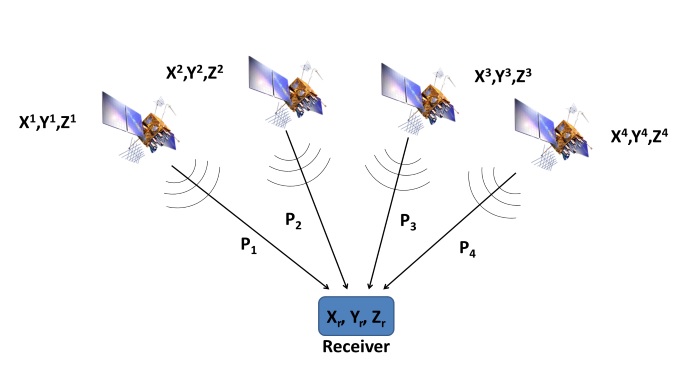
The GPS signals are transmitted from GPS satellites to each antenna through the ionosphere. Then the GPS receivers process the signals and convert the data into RINEX format or suitable formats and transfer them to PC. To estimate the position of a GPS receiver, it is essential to have at least four GPS satellites which are simultaneously visible to the receiver. The three-dimensional position P1 of the GPS receiver is computed by solving four range-measurement equations extracted from the navigation messages of four visible satellites as follow. In this method, only a single frequency of GPS signals is requiredin these equations. For precise-position computation (with lower positional errors), two frequencies will be needed.
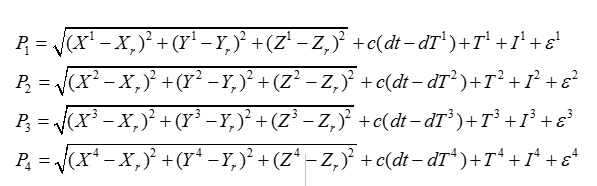
where
- Xj,Yj,Zj ,{j=1, 2, 3,…} – position of the jth satellite,
- Xr,Yr,Zr – position of theGPS receiver r,
- Pj – pseudorange computed from the jth satellite
- c – speed of light
- dt – receiver clock error
- dTj – satellite clock error
- Tj , Ij and epsilon(e) are the tropospheric delay, the ionospheric delay, and other errors.
Figure 1 compares the horizontal errors between two methods of position computation.
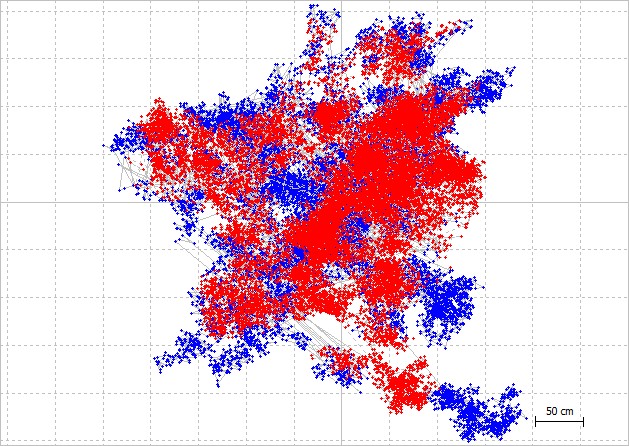 |
| Fig.1. Horizontal positioning errors. |
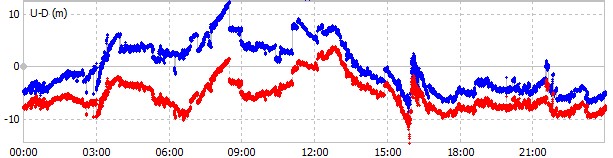 |
| Fig.2. Vertical positioning errors |
Although the GPS errors are caused by several factors, the ionosphere is a dominant source of errors. Troposphere affects the higher frequencies above 2 GHz, while multipath can be reduced by placing the receiver antenna on the tall building without obstruction. For geodetic-grade receiver, ring-type antenna is often used to eliminate the multipath, especially the echo of signals bouncing from the ground. It is, therefore, necessary to study the ionosphere and its effect on the GPS accuracy and integrity.
To reduce the ionopheric errors, a well-known model called ‘Klobuchar model‘ can be used to estimate the ionospheric delay. More accurate models are based on broadcast data from International GNSS Service (IGS) as well as local models. In addition, the International Reference Ionosphere (IRI) model can be used.
References
- P. Misra and P. Enge, “Global Positioning System: Signals, Measurements, and Performance,” Ganga-Jamuna Press, 2012.
- P. Le Hoai Phong, “Scintillation effects on GPS signal and TEC model based on neural network,” King Mongkut’s Institute of Technology Ladkrabang, 2012.
- Klobuchar, et al., “Ionospheric Time-Delay Algorithms for Single-Frequency GPS Users,” IEEE Transactions on Aerospace and Electronic System (3), pp. 325-331, 1987.