The Global Navigation Satellite System (GNSS) is commonly used in the aircraft navigation system, during many phases of a flight. The International Civil Aviation Organization (ICAO) has proposed a Ground-Based Augmentation System (GBAS) [1] as an ICAO standard for the auto-landing system in an aircraft, on or after the approaching phase, within 42.6 km (23 nautical miles) from an airport [2]. In this system, the aircraft position accuracy can be improved by using the differential correction from ground reference stations at the airport. Three or four multi-frequency GNSS receivers must be installed around the area for the GBAS service. However, variation in the local area ionospheric delay is a primary impediment for the GNSS signal quality [3]. The aircraft positioning errors, both vertical and horizontal, estimated with the ground correction service, have to be maintained in an acceptable range [4], so performance monitoring of the positioning systems around the airport is needed by using GBAS.
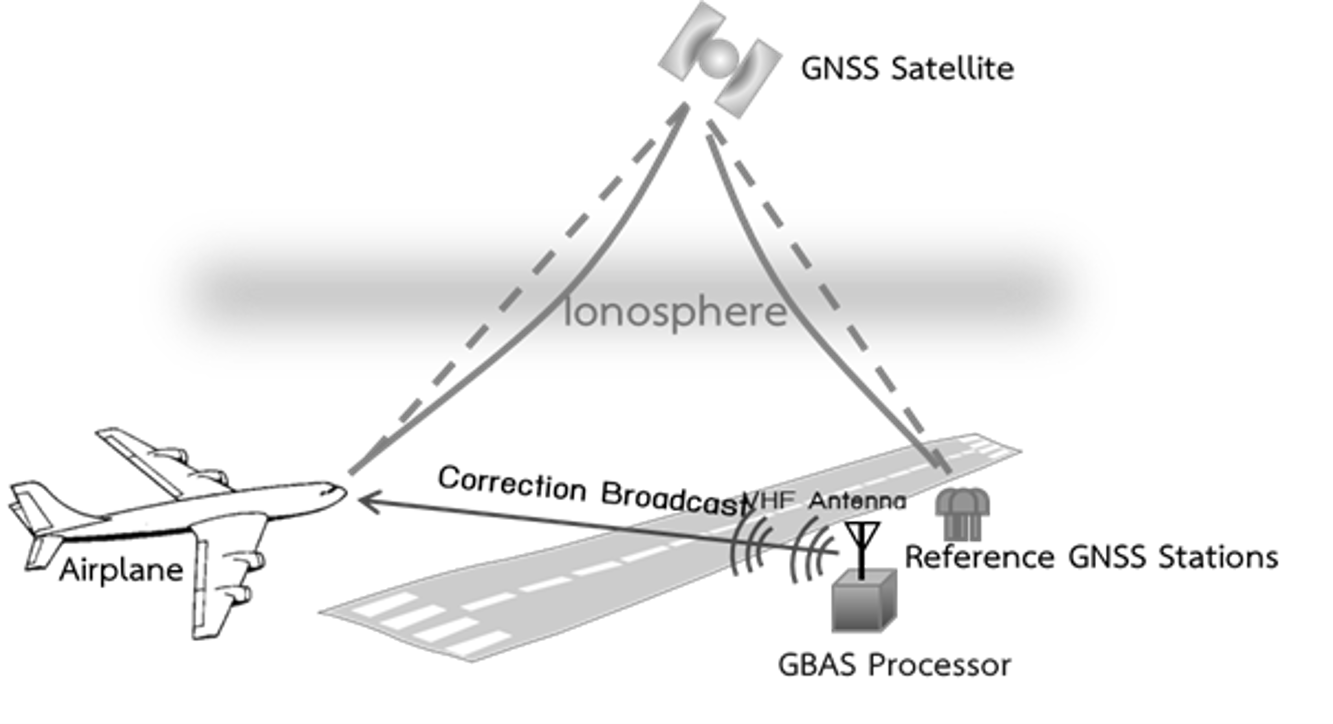
Fig. 1 The Ground-Based Augmentation System (GBAS)
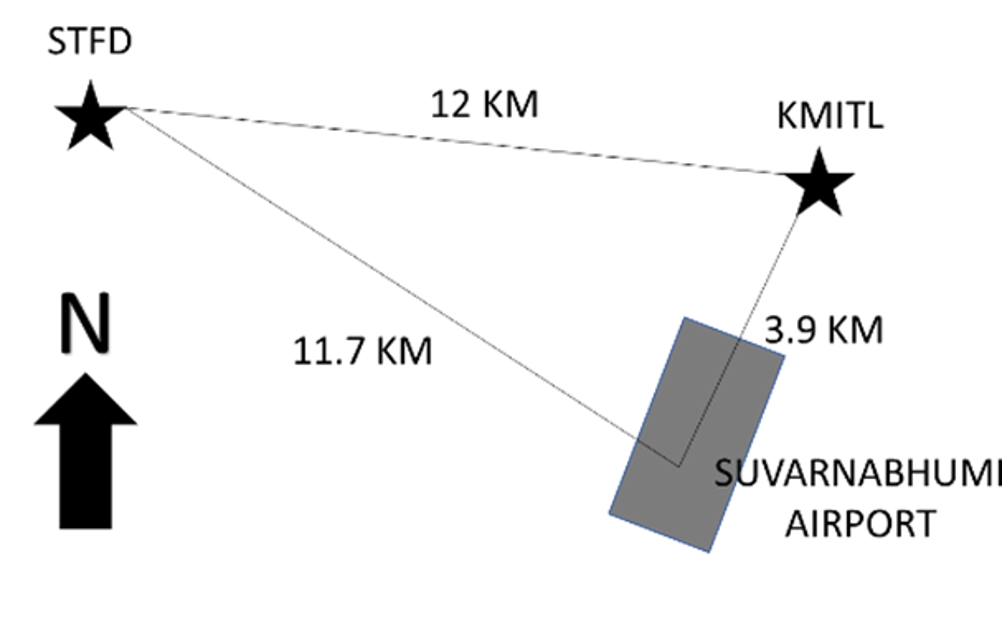
Fig. 2 GNSS receiver locations at both STFD and KMITL stations near Suvarnabhumi airport, Thailand.
In GBAS, statistics of the ionospheric variations [3] is one of the parameters in the performance monitoring systems. At the ionospheric pierced point, IPP, is defined as the point at which the signal passes into the ionosphere. The delay gradients refer to the difference between two slant delays, divided by the separations of the IPPs. The understanding of normal vertical ionospheric delay gradients (sVIG) is important for GBAS operation. The parameter sVIG is used to calculate the protection level, which bounds the error in the usual fault-free conditions. Therefore, it ensures safety in common operating condition.
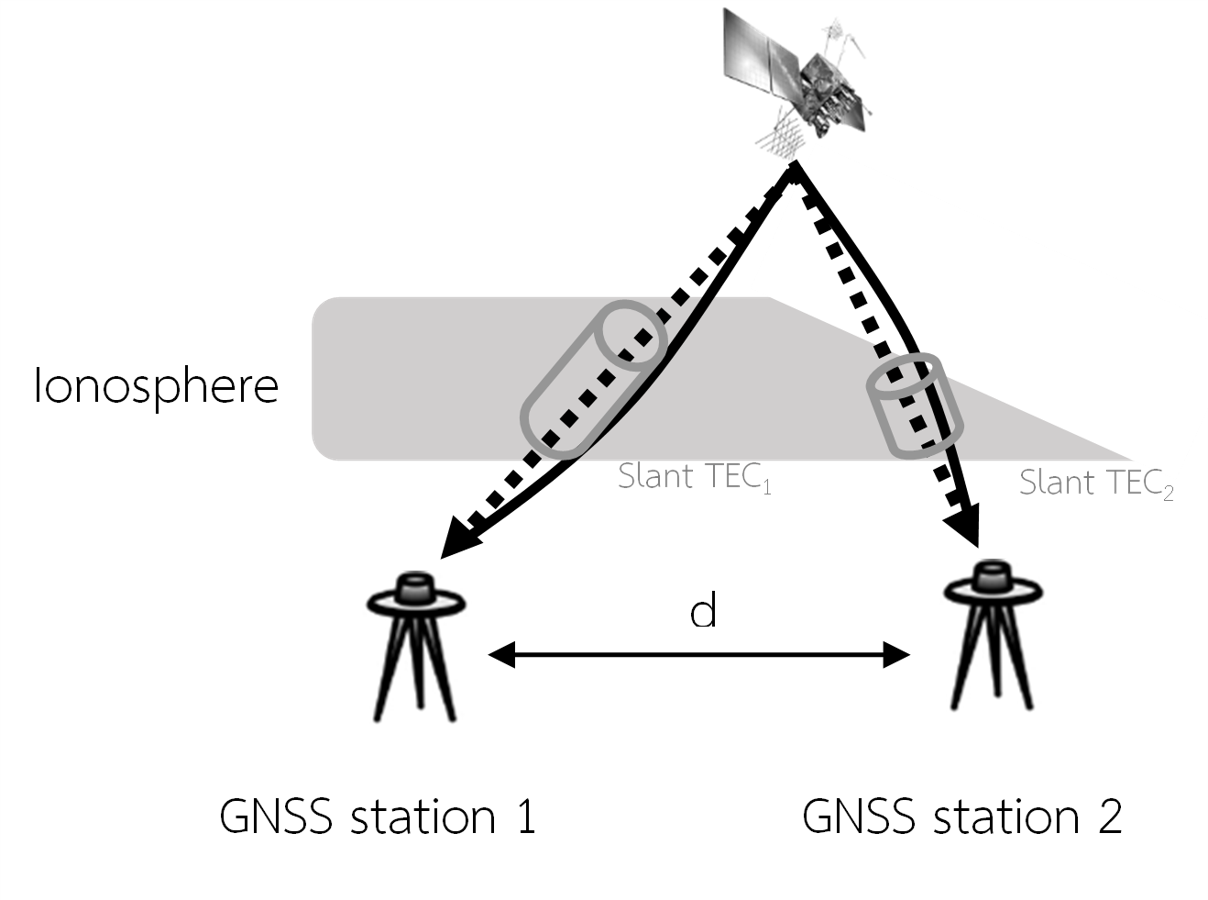
Fig. 3 The ionospheric delay gradient estimated from two ionospheric pierced points (IPPs)
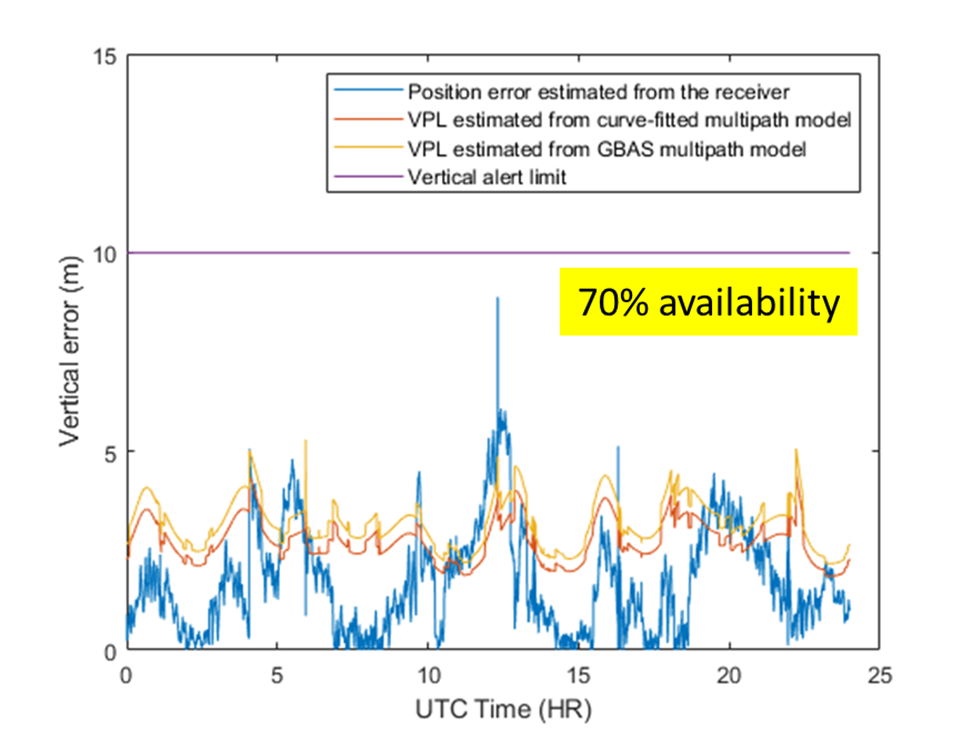
Fig. 4 The GBAS simulation results from Suvarnabhumi airport
References:
[1] ICAO, “Adoption of amendment 91 to annex 10, volume II,” Quebec, Canada, 2018.
[2] G. Scott and D. Gebre-Egziabher, GNSS Applications and Methods. 2009.
[3] E. Robert, P. Jonas, J. Vuillaume, D. Salos, L. Hecker, and P. Yaya, “Development of a European ionosphere threat model in support of GBAS deployment,” in 2018 IEEE/ION Position, Location and Navigation Symposium, PLANS 2018 – Proceedings, 2018.
[4] E.-114A EUROCAE, “MOPS for global navigation satellite ground based augmentation system ground equipment to support category I operations,” 2013.